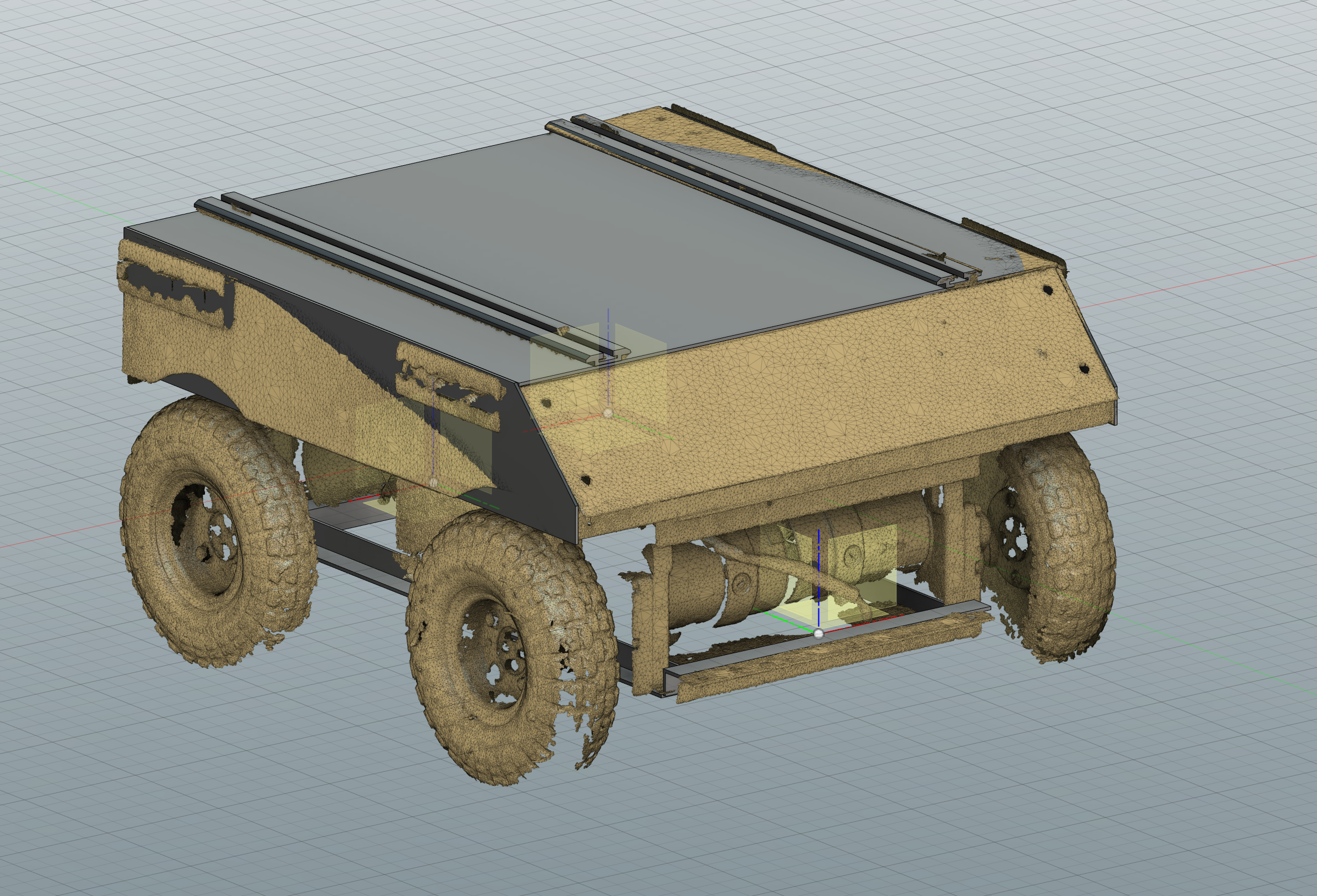
My latest 3D scanning and reverse engineering project. I bought this snow plow to adapt to my robot and the best way to save time and materials is to make modifications and fit it in CAD before doing any cutting and welding on the actual part.

I am always impressed by how accurate parts look in the 3D scanning software with color and texture details. This model looks a little mottled due to scanning it in multiple parts under various lighting conditions. Overall this probably took 3 hours to go from starting the scan to having a model ready to export as a STL file.