Arcadia Tractor
Arcadia Tractor was a robotics startup working to develop an autonomous agricultural robot capable of completing various tasks. Its primary goal however was to autonomously collect golf balls on a driving range and deposit them in a ball washing station so they can be cleaned and returned to the pool of driving range balls.
I joined Arcadia Tractor in October of 2023 bringing my extensive design and fabrication capabilities. My primary goal was to rapidly propel the company’s 3D designs forward and place them in a position where they could begin manufacturing robots in larger scale.
CAD Model Development and Design For Manufacturing
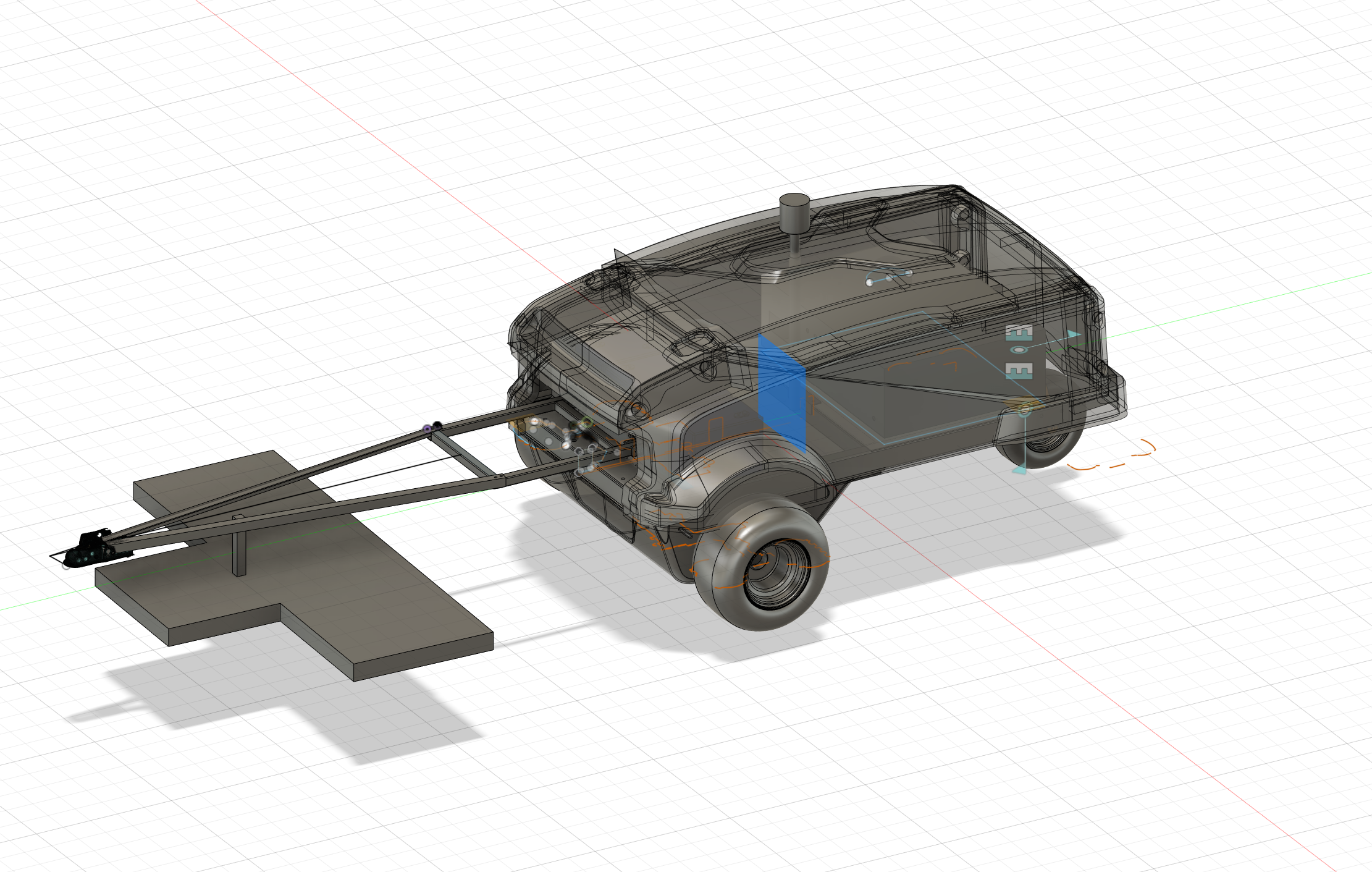
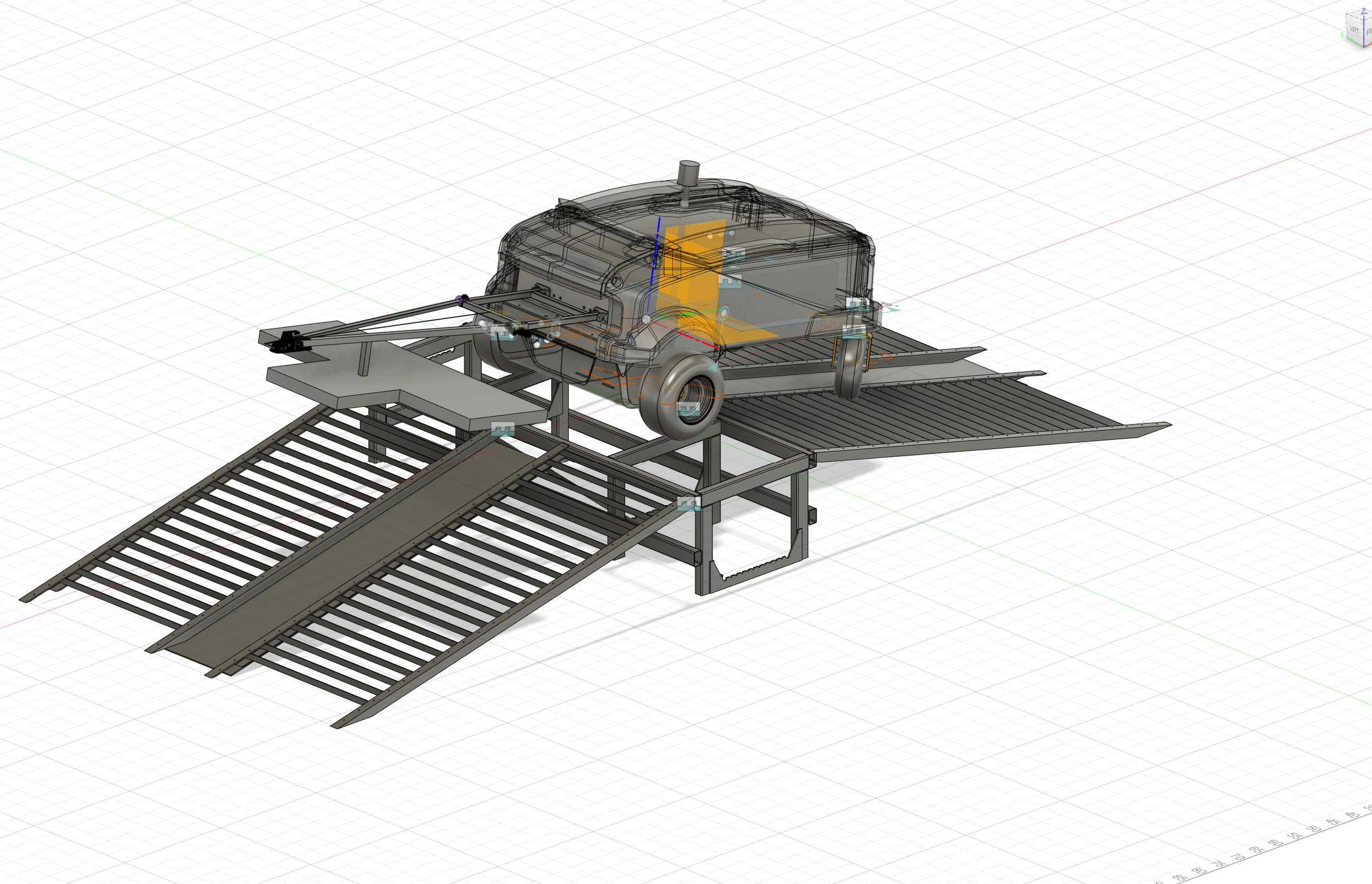
My primary responsibility at Arcadia Tractor was to create and maintain the CAD models for the existing robot design then carry it forward and develop the next generation robot based on what was learned from field operations with the existing robot. This was complicated however when I found the CAD model of the robot was little more than a space claim and most parts were missing. In order to resolve this problem I made a trip to San Jose California on a Monday bringing along my 3D. Took as many scans as possible in the short time I had Tuesday before flying back to Portland, and by Friday of the same week, I had a full and accurate model of the robot along with motion studies for the wheels that could be used for next generation development. The accuracy of my work was later tested when models of the bodywork were found and to my surprise the bodywork dropped right onto my model and aligned perfectly with the mounting holes.
With a basic model created of the existing robot I built up a file structure within Autodesk Fusion 360 to keep everything organized and got to work refining the design through eliminating or simplifying components.
Robot Simulation and ROS2
With the 3D model completed, I turned my attention to trying to assist the software team with development of the robot. To understand the environment the software team was working in and the challenges they were dealing with I began working through several tutorials building up my own simulated robot running ROS2 code and operating in RViz and Gazebo. One problem with this was that the software team was still using ROS and had not yet made the transition to ROS2 so while I was unable to directly work with the existing software for the robot, I was able to lay the groundwork for the next generation robot and develop and understanding of how the software operates. I also began to explore other methods of autonomous operation and even built my own fully functional rover that was able to navigate using pre planned GPS waypoints.
Since I had developed the 3D model of the existing robot, I found that there were ways to convert that 3D model into a URDF file that could then be imported into Gazebo which would allow us to run and simulate the actual robots code and operation in software instead of having to run and test code in the field. This would prove to be a great benefit, especially as we developed new software features such as golf ball recognition. The export of the URDF file required me to build and maintain a completely new 3D model since the conversion software had some limitations on the feature tree but this was a small issue considering the benefits that a simulation would provide.
Infrastructure Automation
One of my final projects for Arcadia Tractor was to work on automating the ball drop washing station. While the robot was generally able to go out on the field and collect golf balls autonomously, the ball washing station that it would deposit the balls into still had to be manually switched on and off. In order to resolve this problem I began designing a system based on an Arduino that would detect the presence of golf balls waiting to be washed and then switch on the ball washing equipment to process the balls waiting to be washed. It could also additionally provide a running count of each ball as it is deposited into a hopper waiting to be returned to the range ball pool.
I was able to write and simulate the software on a virtual Arduino but unfortunately this was as far as this project progressed.
Unfortunately Arcadia Tractor ran out of funding in the middle of December 2023 and was unable to continue the development of the robot from that point on. I however feel very proud of my contributions. Being involved with Arcadia Tractor inspired an interest in robotics and I carried forward what I learned into the development of my own robot project.